Russian physiologist Ivan Pavlov famously trained the canines in his experiments to salivate in response to the sound of a bell, which was a showcase of classical conditioning. These days, robotics researchers are actively pursuing the technology to give inanimate objects the ability to adapt and respond to their environment.
In a recent publication, a group of scientists based in Finland reported the development of a "smart" thermoplastic-based actuator. This one-of-kind artificial material has the self-learning ability based on on its past experience, without any programmable inputs from a computer.
LabRoots reached out to Drs. Hao Zeng and Hang Zhang, the co-first authors of the published study and postdoctoral researchers at Tampere University and Aalto University, respectively, to discuss the exciting invention in detail.
"The original question on whether a material can learn was proposed by Professor Olli Ikkala at Aalto University. But learning in its biological sense is overwhelmingly complicated and impossible to achieve in artificial systems at the moment fully", said the researchers.
For this reason, the group had chosen classical conditioning, one of the most simple form of learning, to be implemented in their research with artificial materials.
"The classical conditioning experiments on dogs by Pavlov demonstrated that by showing the food and bell simultaneously, the dog learns to salivate by hearing the bell, an original neutral stimulus for the dog," Zeng and Zhang explained. "One may thus to make responsive materials to behave like dogs, by associating two different stimuli, is to train the material to respond to the original neutral stimulus (as a dog salivates when hearing the bell)."
Following this idea, the researchers wished to enable their robotics components to learn, more specifically, to evolve to respond to an initial stimulus. "In our material, the soft actuator initially responds to heat but not to the light and becomes light-responsive after an association process of light with heat," they said.
First, the Finnish group constructed a soft actuator that is made of liquid crystal networks (LCNs) and light-absorbing dyes. In the beginning, the LCN responded solely to heat but not light, by exhibiting bending motion. Once the scientists exposed the actuator with light irradiation and heat simultaneously, the material becomes light-responsive because the heat triggered the dye molecules to diffuse and rearrange themselves across the polymer network. After the "associative learning" process, the pre-conditioned LCN can now bend upon the exposure of light.
Light robot (Tampere University)
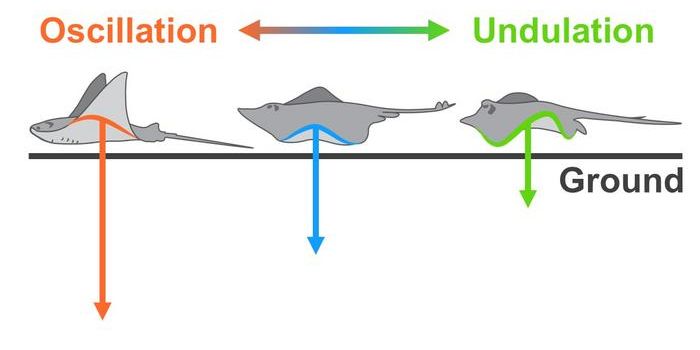
The researchers turned a "trained" actuator into a locomotive unit. Upon repeated light irradiation, the unit was capable of a worm-like movement.
There are other designs of soft robots and actuators that are made with shape-memory materials and give invariable responses to outside stimuli. The associative learning property of the Finnish group's design sets them apart from their peers.
"First of all, the remote-controlled actuation enables minimization of soft robot, while conventional soft robots rely on pneumatic or dielectric actuators, where a wire-connection is necessary for powering and controlling the machine," the researcher commented on the advantage of their actuator design.
"Besides, by incorporating the 'learning' function within the material itself, we can get rid of “bulky” computers and enable applications where the use of computers is not desirable or if electric supply is impossible."
By combining the remote-controlled actuation and the "self-learning" ability, they invented a device that is small, robust, and capable of adapting depending on its experience.
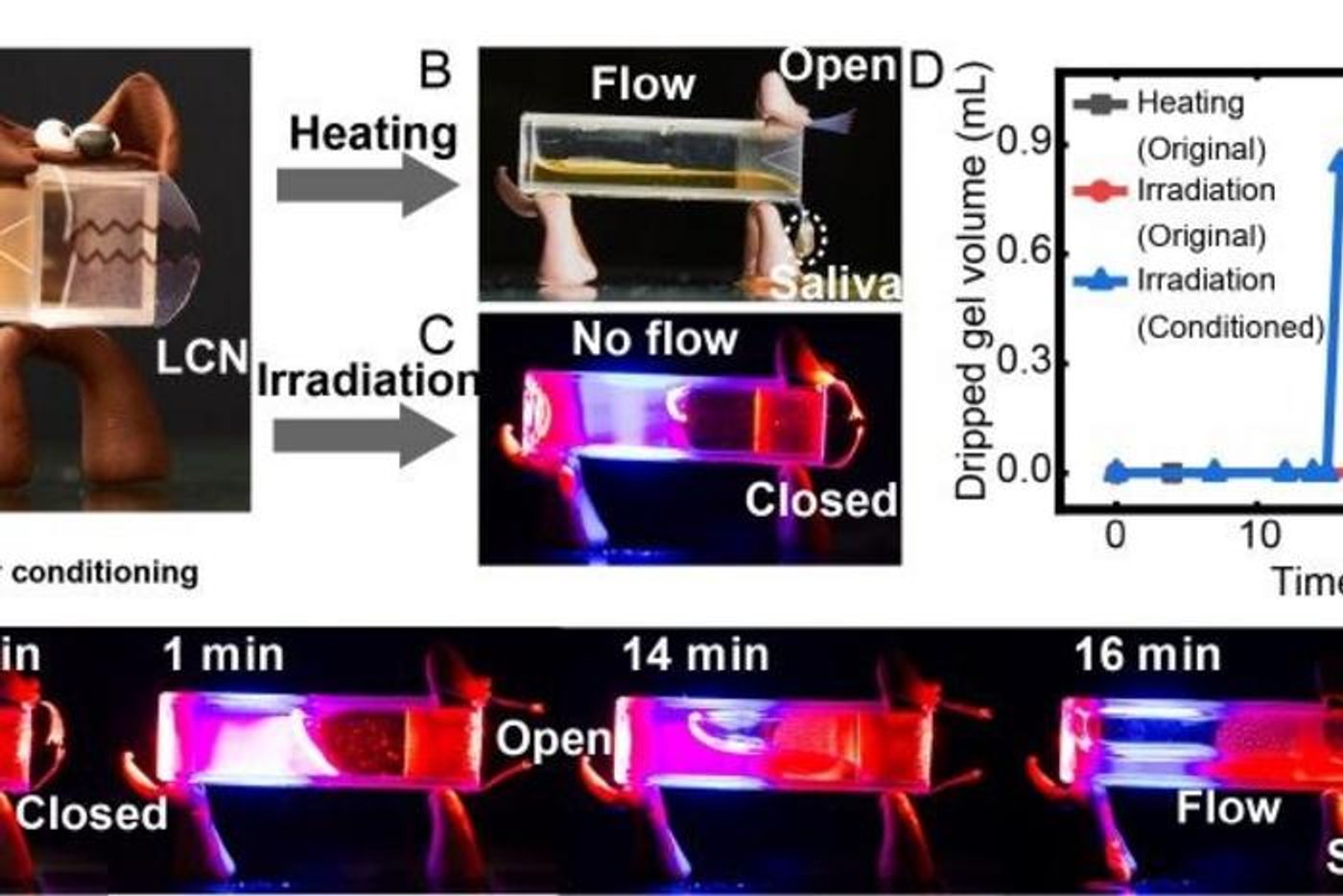
To apply their concept to an integrated robot, they built an artificial dog that combined the actuator with a "self-learning" hydrogel, another "smart" material reported in their previous study. The faux canine, much like the real ones in the classical Pavlovian experiments, obtained an associative memory from concurrent exposure of light and heat, and later exhibited light-responsive "drooling" behavior.
"We believe that soft light-responsive robots will find their ways to the biomedical applications which require sophisticated adaptations. The present liquid crystal network actuator is still some steps away from real biomedical applications, as there are, for instance, bio-compatibility, operating temperatures issues," Zeng and Zhang talked about the prospective applications for their Pavlov's canine-inspired actuator.
"But in the long run, the current self-learning concept may inspire adaptive soft robots, for example, microscopic surgical robots that can navigate inside the blood vessel or the intestines and adapt to the environment there depending on the temperature or softness of the tissue."
The researchers hope that this learning concept can inspire others to pursue new research at the interface between biological systems and smart materials.
This study is published in the journal Matter.
Source: Science Daily/Tampere University