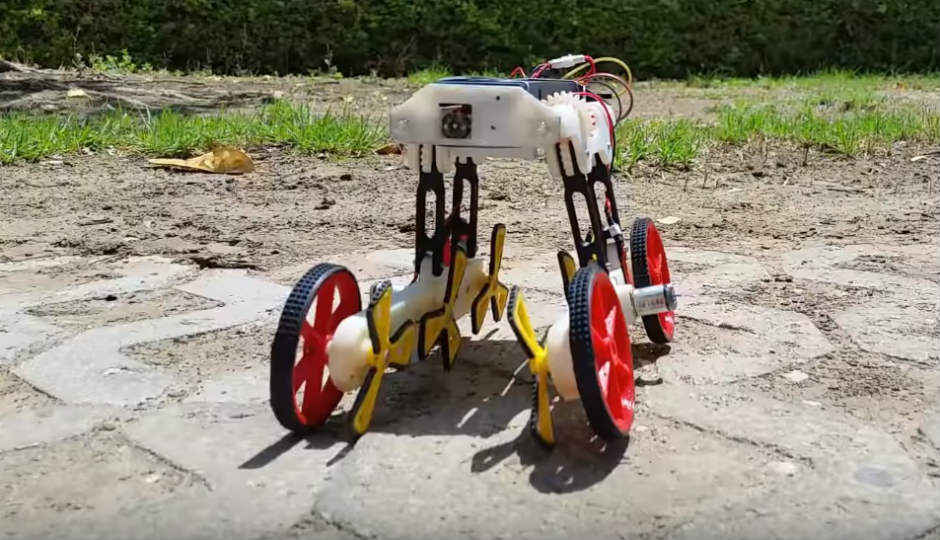
Rising Sprawl-Tuned Autonomous Robot (RSTAR), which was introduced at the International Conference on Robotics and Automation (ICRA 2018) in Brisbane, Australia, is the name of an innovative robot developed by Ben-Gurion University of the Negev (BGU) researchers. RSTAR is a highly maneuverable robot that was created for rescue operations. It is capable of climbing rough terrain, creeping in tight places, and crawling on all kind of surfaces. RSTAR works to utilize its adjustable sprawling wheel legs that are attached to a body capable of moving independently. RSTAR can reposition to climb over obstacles no matter how large, run on flat surfaces, and enclosed spaces such as pipe tunnels or narrow gaps.
The robot can use its round wheels to travel at high speeds, a little more three feet per second on many surfaces including like thick mud and sand, without getting stuck. By pressing its wheels to the wall surfaces and without touching the floor, it can also climb vertically and crawl horizontally.
"The RSTAR is ideal for search and rescue operations in unstructured environments, such as collapsed buildings or flooded areas, where it must adapt and overcome a variety of successive obstacles to reach its target," says Dr. David Zarrouk, a lecturer in BGU's Department of Mechanical Engineering, and head of the Bio-Inspired and Medical Robotics Lab. "It is the newest member of our family of STAR robots." Dr. Zarrouk along with GU student, Liran Yehezkel, and fellow robotic workers, designed RSTAR to be functionally reliable without any kinks.
RSTAR was specifically designed to change its shape and overcome common obstacles without the need of external mechanical intervention. With relatively low energy consumption, RSTAR proves to be ideal for a broad range of rescue missions that may require extensive use of time.
Source: American Associates, Ben-Gurion University of the Negev