In a recent study scheduled to be presented at the RoboSoft Conference, a team of researchers from the Massachusetts Institute of Technology (MIT) have built a robotic hand capable of sensing touch and identifying an object after grabbing it only once. This new robotic “skin” builds on previous studies pertaining to robots sensing touch, but that previous work required robots to grab objects multiple times or not being able to acquire as much detail about the object it’s grabbing.
Credit: Massachusetts Institute of Technology
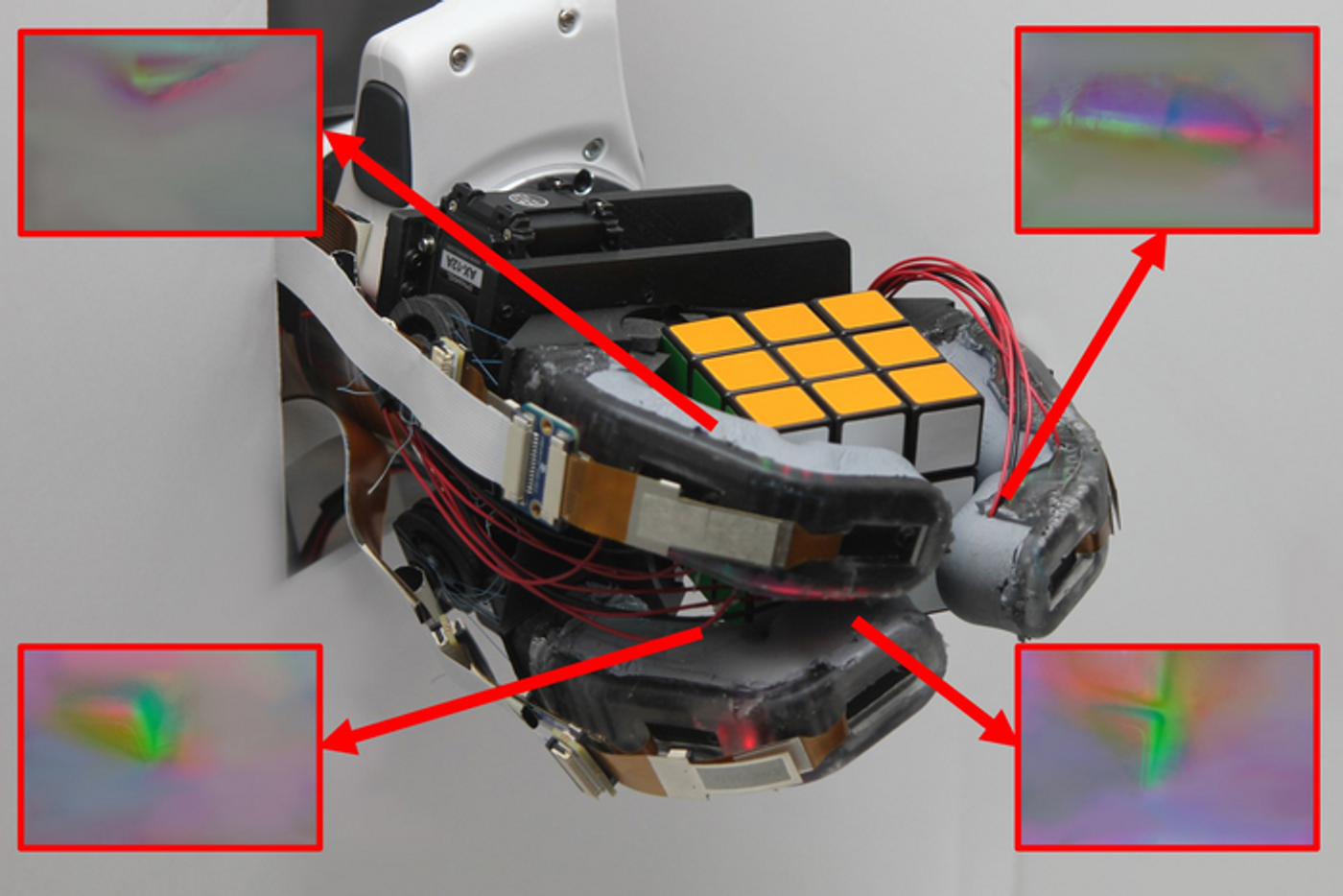
“Having both soft and rigid elements is very important in any hand, but so is being able to perform great sensing over a really large area, especially if we want to consider doing very complicated manipulation tasks like what our own hands can do,” said Sandra Liu, who is a Mechanical Engineering PhD Candidate at MIT, and lead author of the study. “Our goal with this work was to combine all the things that make our human hands so good into a robotic finger that can do tasks other robotic fingers can’t currently do.”
Credit: Massachusetts Institute of Technology
For the study, the researchers created the robotic hand with a rigid, 3D-printed endoskeleton which is encased in a transparent silicone “skin”. They also designed it to mimic a human hand in terms of not only its sense of touch, but also how the fingers slightly curve, as well.
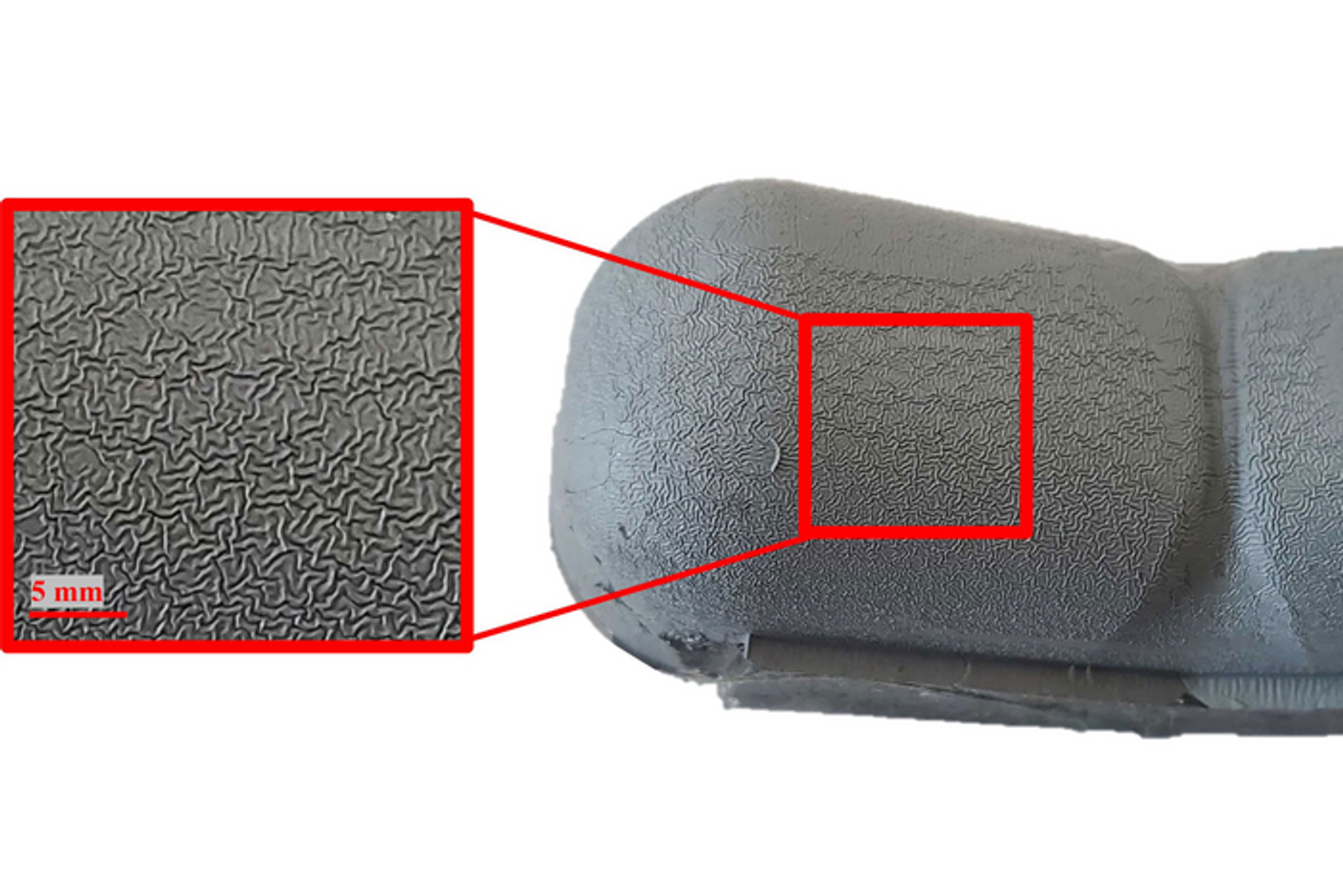
“Silicone will wrinkle when it bends, so we thought that if we have the finger molded in this curved position, when you curve it more to grasp an object, you won’t induce as many wrinkles,” said Liu. “Wrinkles are good in some ways — they can help the finger slide along surfaces very smoothly and easily — but we didn’t want wrinkles that we couldn’t control.”.
To enable the touch sensation for the robot fingers, the researchers used what are known as GelSight sensors, which is a technology spearheaded by Liu’s research group led by her advisor, Dr. Edward Adelson, and are comprised of a camera and three colored LEDs.
The researchers used a machine learning algorithm to help identify the objects the robotic hand was grasping, while also discovering that the silicone wrinkles improved the integrity of the “skin” and helped it not rip during the trials.
“The usefulness of the wrinkles was an accidental discovery on our part. When we synthesized them on the surface, we found that they actually made the finger more durable than we expected,” said Liu.
Going forward, the team hopes to improve upon both the hardware and long-term wear and tear on the silicone, along with improving the thumb dexterity so it can carry out more tasks.
“Although we have a lot of sensing in the fingers, maybe adding a palm with sensing would help it make tactile distinctions even better,” Liu says.
What new discoveries will scientists make about robotic hands in the coming years and decades? Only time will tell, and this is why we science!
As always, keep doing science & keep looking up!
Sources: arXiv, MIT