Artificial skins can help prosthetics and robotic limbs to process sensations and perform tasks with more dexterity. A new silicone rubber skin designed by engineers from the University of Washington (UW) and the University of California, Los Angeles (UCLA) is unique in that it can sense shear force with high accuracy. It does this at the same time as sensing normal “push” forces (direct pressure) and vibrations.
To experience shear force, slide your finger along the top of a surface. The skin on one side of your fingernail will become taut and the other will bulge out as tension builds between your moving finger and the stationary object. These forces pushing in opposite directions are known as shearing forces. Our fingers can rely on the experience of shear force to know whether we are holding, dropping or pulling on a rope and to discern textural differences. With the use of the new skin, prosthetics and robots will be able to experience shear force more precisely. While other synthetic skins have sensed shear force, none have done it so accurately while also sensing the other two main types of sensory experiences (push and vibration).
“Traditionally, tactile sensor designs have focused on sensing individual modalities: normal forces, shear forces or vibration exclusively. However, dexterous manipulation is a dynamic process that requires a multimodal approach. The fact that our latest skin prototype incorporates all three modalities creates many new possibilities for machine learning-based approaches for advancing robot capabilities,” says co-author and UCLA associate professor of mechanical and aerospace engineering Veronica Santos.
How Does the Skin Work?
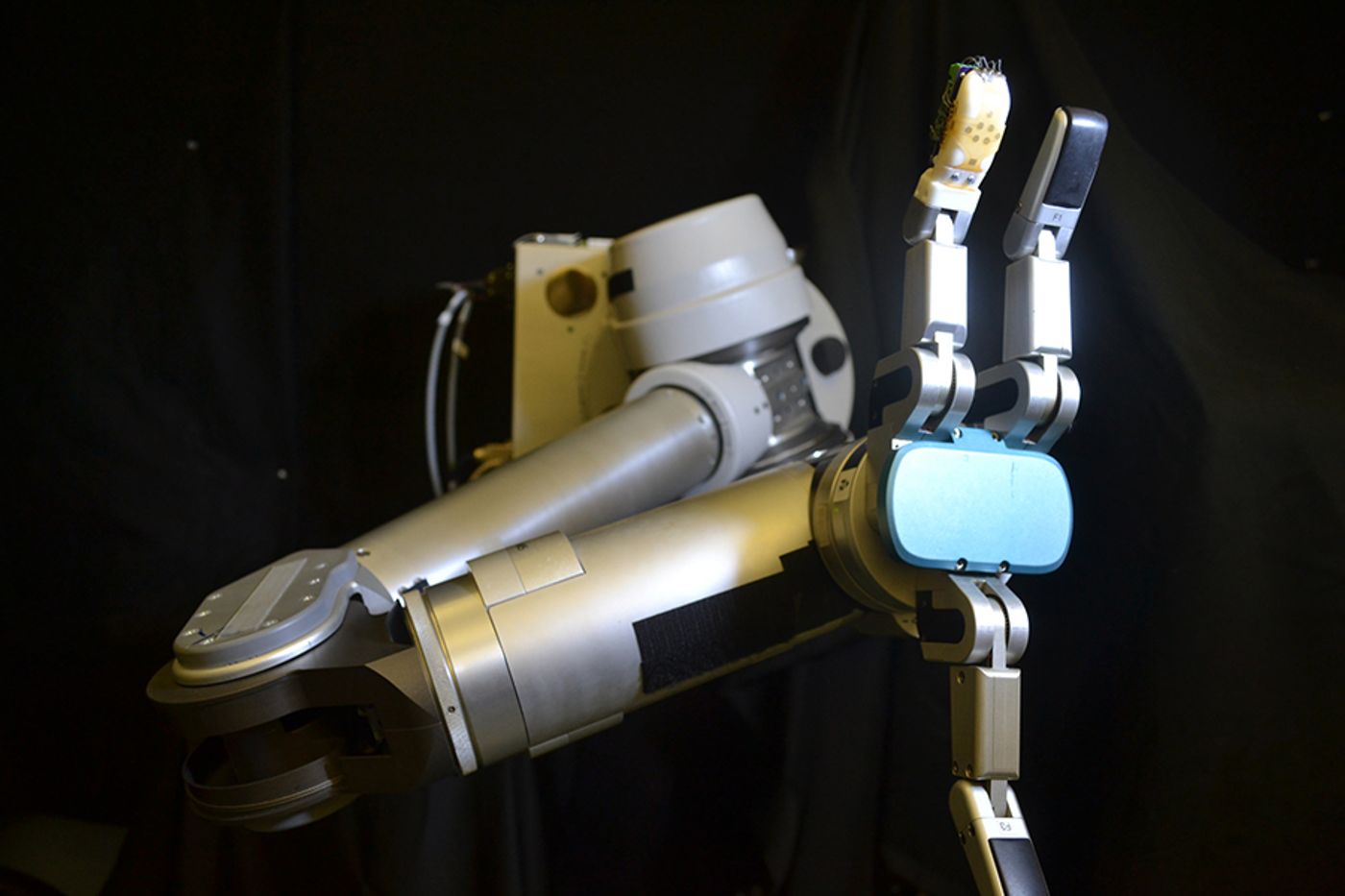
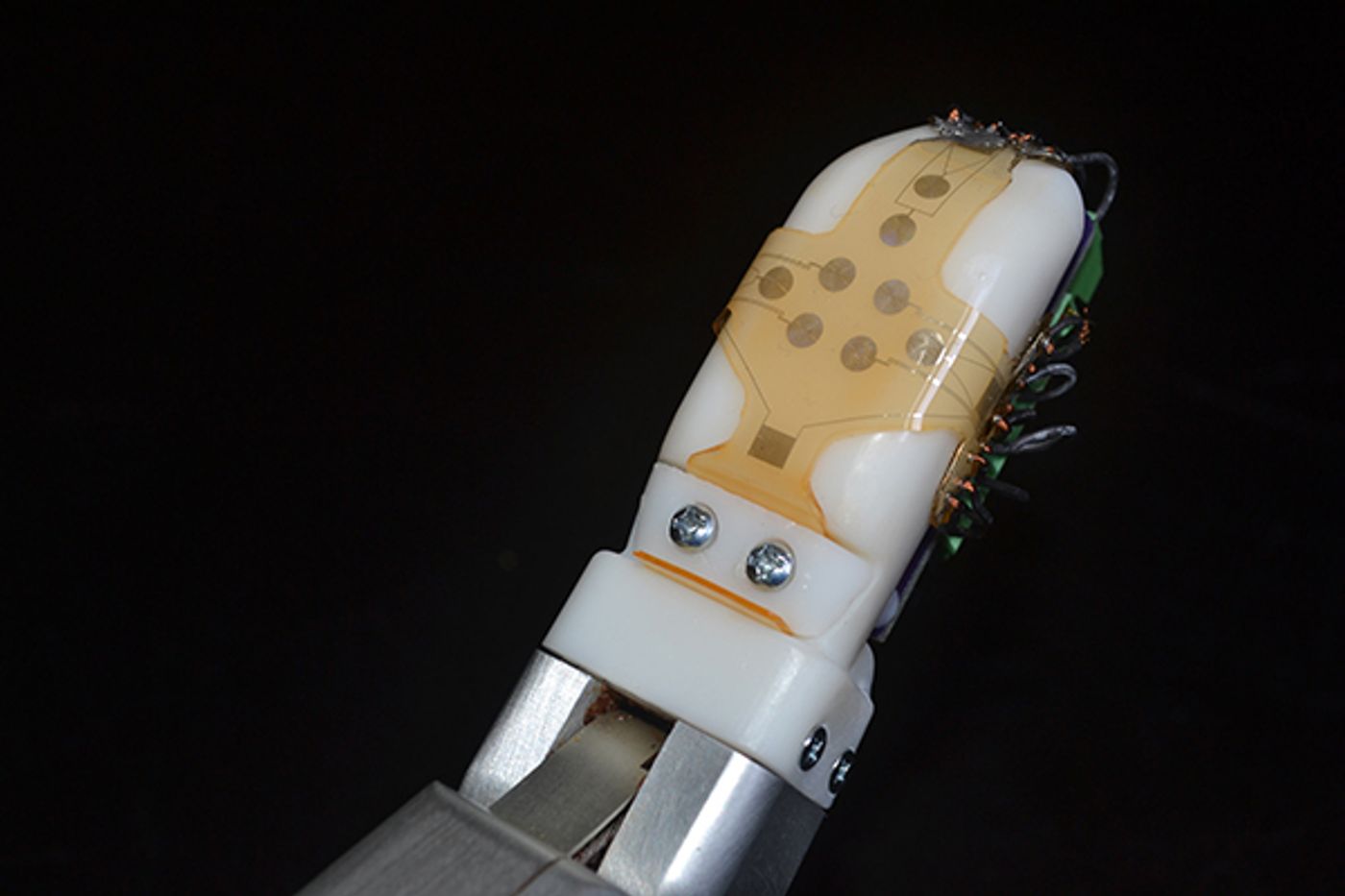
The rubbery skin is wrapped around an artificial finger or end effector – the gripping device at the end of a robotic arm. The skin is embedded with tiny channels containing conductive liquid metal. These function as sensors and are concentrated on either side of where the human fingernail would be. Just like a human finger, when the robotic finger slides across a surface, some of the skin grows taut and some bulges. This alters the flow of electricity within the channels, which tells the engineers how much shear force and vibration the skin is experiencing.
Because the sensors are located on the back of the artificial finger where a fingernail would be, the normal push sensations on the front of the finger can be processed separately. This allows the digits using this skin to experience a fuller range of tactile information. In some experiments, the skin detected vibrations better than human fingers can -- at a rate of 800 times per second. The project abstract explains the skin is “intrinsically flexible and immune to fatigue and other problems of solid-state sensors when subjected to repeated, large strains.”
What is the Skin for?
“If a robot is going to dismantle an improvised explosive device, it needs to know whether its hand is sliding along a wire or pulling on it. To hold on to a medical instrument, it needs to know if the object is slipping. This all requires the ability to sense shear force, which no other sensor skin has been able to do well,” says senior author Jonathan Posner, a UW professor of mechanical and chemical engineering.
This electronic skin could help individuals with prosthetics or robots with a wide variety of common gripping and manipulating tasks, such as making scrambled eggs, cleaning or opening a door. The engineers have tested its abilities with using a phone, handling objects of various shapes and sizes, picking up and moving packages, and shaking hands, and found it to have a “high level” of sensitivity and precision.
This team published their findings, “Bioinspired flexible microfluidic shear force sensor skin,” in the journal, Sensors and Actuators A: Physical. The skin is manufactured at UW’s Washington Nanofabrication Facility and the research is funded by the National Science Foundation.
Source:
http://bit.ly/2zhWqXY